A group of specialists from the Georgia Institute of Technology and The Ohio State University has built up a delicate polymer material, called attractive shape memory polymer, that utilizations attractive fields to change into an assortment of shapes. The material could empower a scope of new applications from antennas that change frequencies on the fly to gripper arms for sensitive or substantial items.
The material is a blend of three distinct fixings, all with special attributes: two sorts of attractive particles, one for inductive warmth and one with solid attractive fascination, and shape-memory polymers to help lock different shape changes into place.
“This is the first material that combines the strengths of all of these individual components into a single system capable of rapid and reprogrammable shape changes that are lockable and reversible,” said Jerry Qi, a professor in the George W. Woodruff School of Mechanical Engineering at Georgia Tech.
The exploration, which was accounted for Dec. 9 in the journal Advanced Materials, was supported by the National Foundation of Science, the Air Force Office of Scientific Research, and the Department of Energy.
To make the material, the scientists started by conveying particles of neodymium iron boron (NdFeB) and iron oxide into a blend of shape memory polymers. When the particles were completely joined, the analysts at that point formed that blend into different articles intended to assess how the material performed in a series of applications.
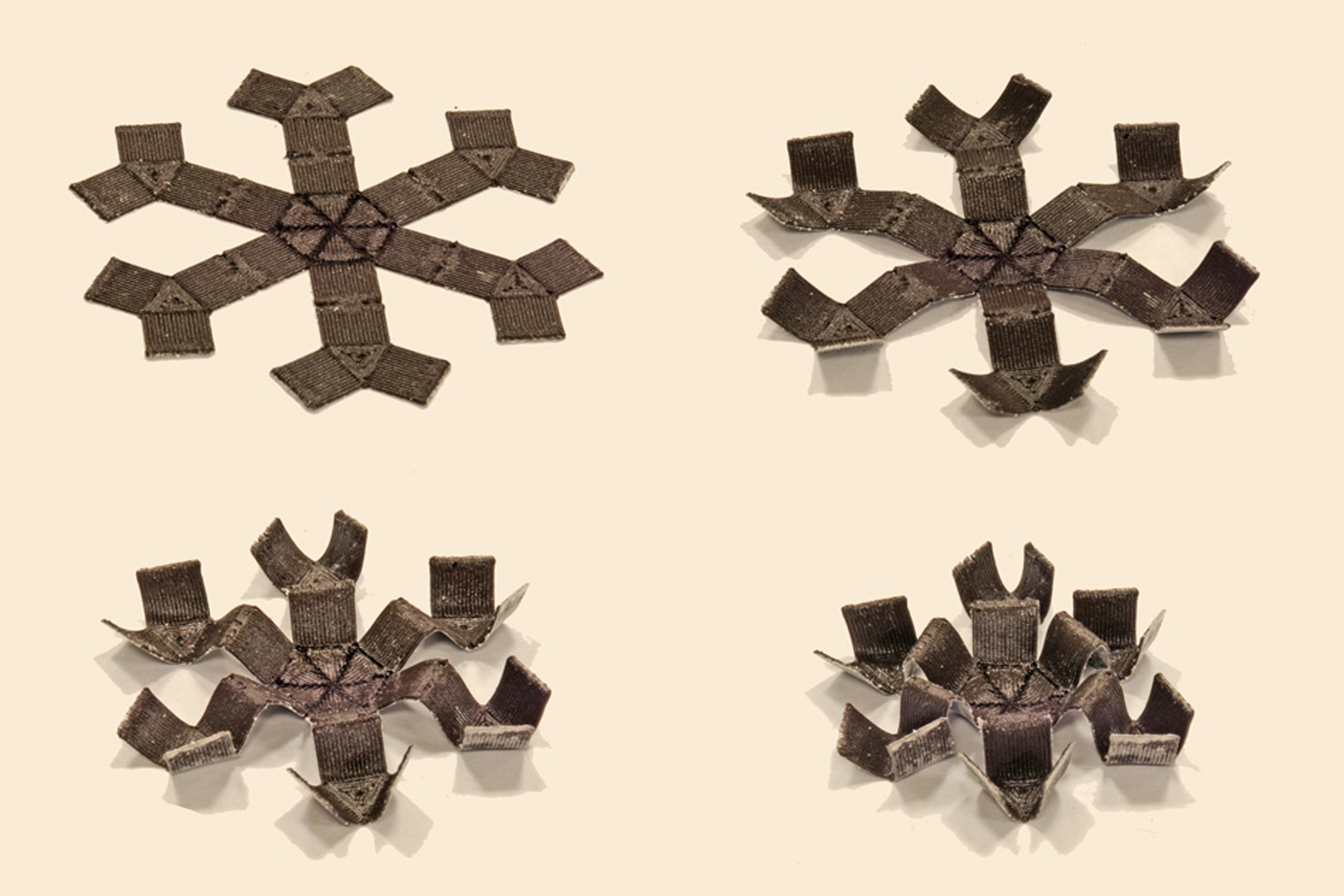
For instance, the group made a gripper hook from a t-formed shape of the attractive shape memory polymer blend. Applying a high-recurrence, wavering attractive field to the article made the iron oxide particles heat up through enlistment and warm the whole gripper. That temperature ascend, thusly, caused the shape memory polymer framework to relax and get flexible. A second attractive field was then applied to the gripper, making its paws open and close. When the shape memory polymers chill back off, they remain secured that position.
The shape-changing procedure takes just a couple of moments through and through, and the quality of the material at its bolted state permitted the gripper to lift questions up to multiple times its very own weight.
“We envision this material being useful for situations where a robotic arm would need to lift a very delicate object without damaging it, such as in the food industry or for chemical or biomedical applications,” Qi said.
The new material expands on prior research that illustrated activation components for delicate mechanical technology and dynamic materials and assessed the confinements in ebb and flow innovations.
“The degree of freedom is limited in conventional robotics” said Ruike (Renee) Zhao, an associate teacher in the Department of Mechanical and Aerospace Engineering at Ohio State. “With soft materials, that degree of freedom is unlimited.”
The scientists likewise tried different applications, where curl formed items produced using the new material extended and retracted—simulating how a antenna might change frequencies when incited by the attractive fields.
“This process requires us to use of magnetic fields only during the actuation phase,” Zhao said. “So, once an object has reached its new shape, it can be locked there without constantly consuming energy.”



